Управление эл.моторами M-MT Toyota
Добавлено: 11 июл 2013, 17:57
Уважаемые форумчане, Уважаемый alflash
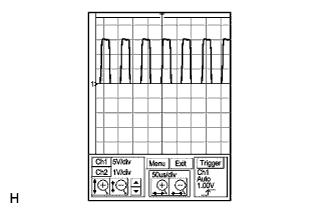
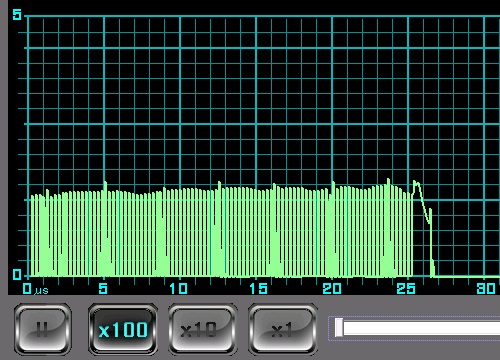
Судя по данных их TechDoc http://toyota-corolla.ru/rm04f1ru/repai ... e00cx.html эл.двигатели выбора и переключения передач управляются в импульсном режиме:
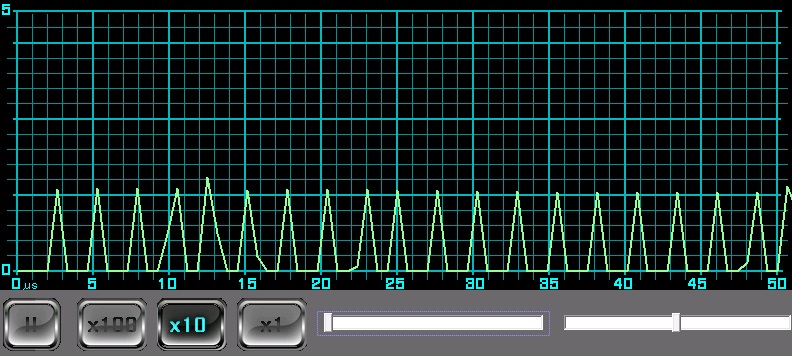
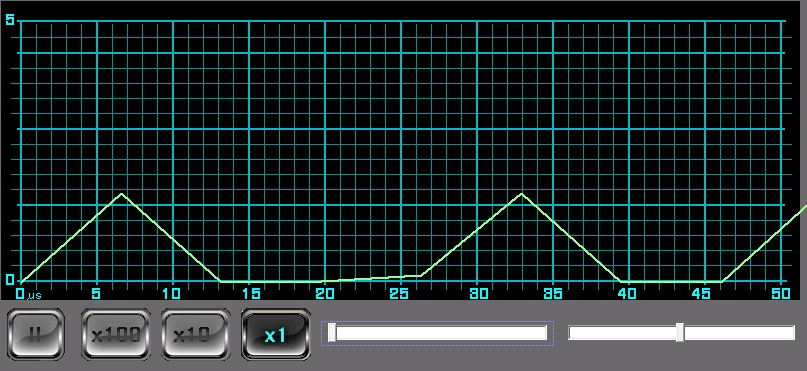
амплитуда 12-14В, длительность импульса 50мкс, скважность 50%.
Пытаюсь имитировать такой режим сторонним контроллером и драйвером для коллекторных эл. двигателей.
В результате при длительности импульса 50мкс эл. двигатели не испевают стартовать.
Увеличение длительности приводит к тому, что эл. двигатели проскакивают нужное положение (центральное, сооответствующее положению передач 3-4).
Возможно я плохо разглядел режимы на фотке... и там не 50мкс.
Возможно есть какая-то информация по данному вопросу, например скриншоты с оциллографов и т.д.
Буду рад любой помощи.
Судя по данных их TechDoc http://toyota-corolla.ru/rm04f1ru/repai ... e00cx.html эл.двигатели выбора и переключения передач управляются в импульсном режиме:
амплитуда 12-14В, длительность импульса 50мкс, скважность 50%.
Пытаюсь имитировать такой режим сторонним контроллером и драйвером для коллекторных эл. двигателей.
В результате при длительности импульса 50мкс эл. двигатели не испевают стартовать.
Увеличение длительности приводит к тому, что эл. двигатели проскакивают нужное положение (центральное, сооответствующее положению передач 3-4).
Возможно я плохо разглядел режимы на фотке... и там не 50мкс.
Возможно есть какая-то информация по данному вопросу, например скриншоты с оциллографов и т.д.
Буду рад любой помощи.
 ,
,  ,
, 
 <-
<- 
 ,
, 
{kind=link}
{kind=link}